This page provides additional information about the camera hardware, calibration hardware, and software setup used to record our benchmark. Our real-world benchmark aims to record videos with dynamic intrinsics while logging ground truth intrinsics for every frame. To do this, we make use of the following:
HardwareSee the following sections for additional details.
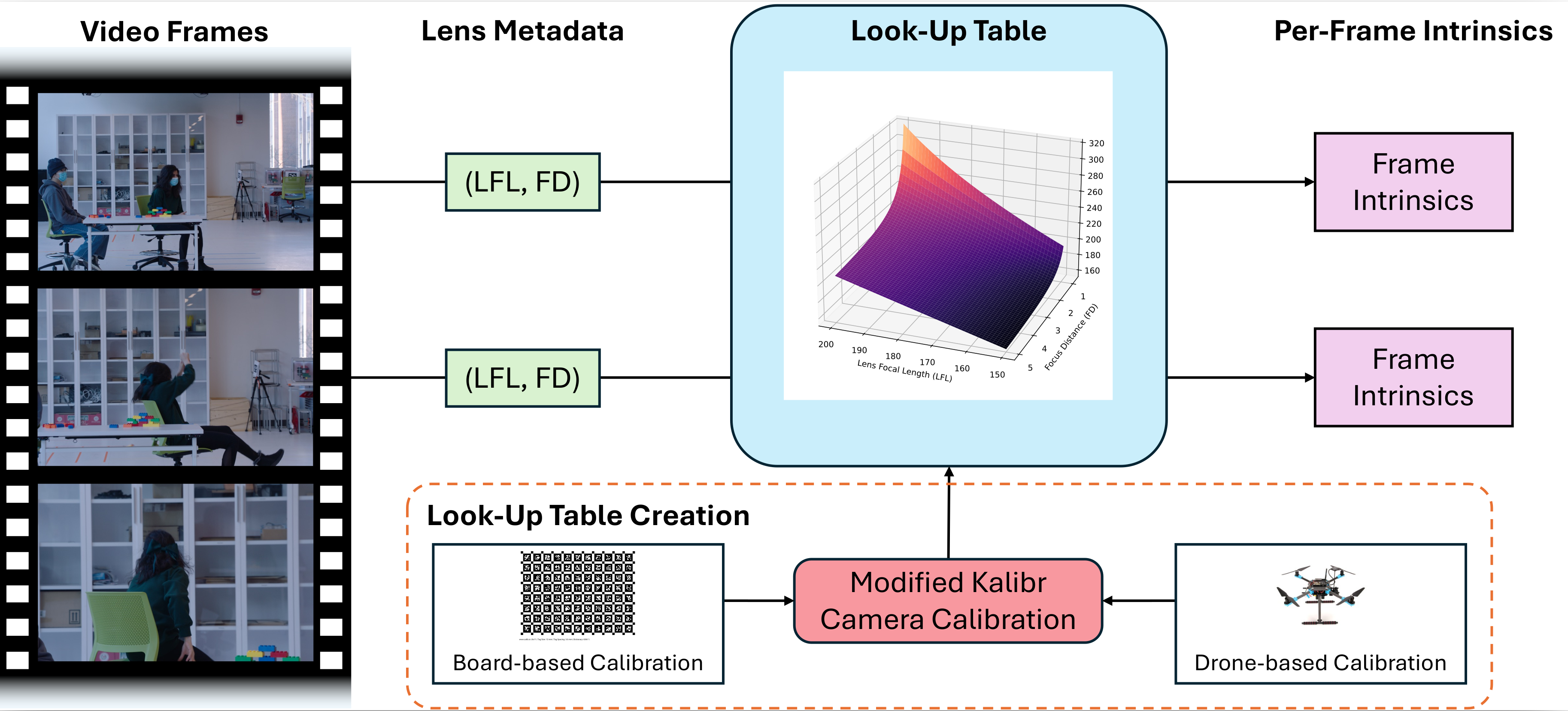
We utilize zoom lenses that record /i Technology lens metadata, which contains per-frame lens focal length (LFL) and focus distance (FD) values that uniquely determine camera intrinsics. We use the following hardware:
During filming, we adjust the zoom and focus rings to move internal lens groups. This changes the zoom and focus distance, which in turn modifies the camera intrinsics. The states of these rings are communicated from the lens to the camera, and we extract this data using ARRI Reference Tool version 0.3.0.

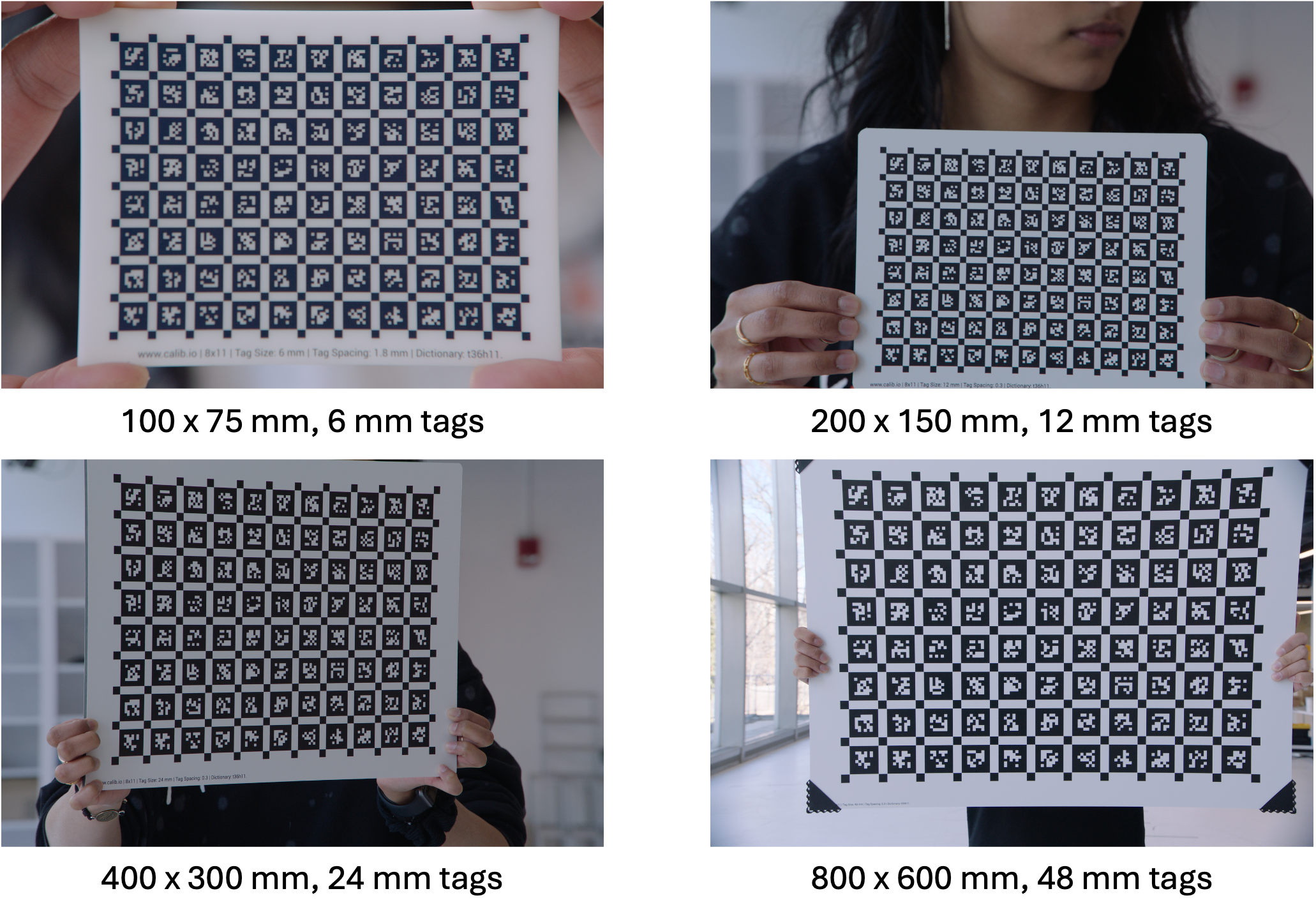
For our calibration board targets, we use four AprilGrid boards from Calib.io of the following sizes:
Each board has an 8 × 11 grid of tags, and the tag spacing used is 0.3. For each experiment, we use the largest board that fits within the camera field of view (FOV).
Drone Calibration
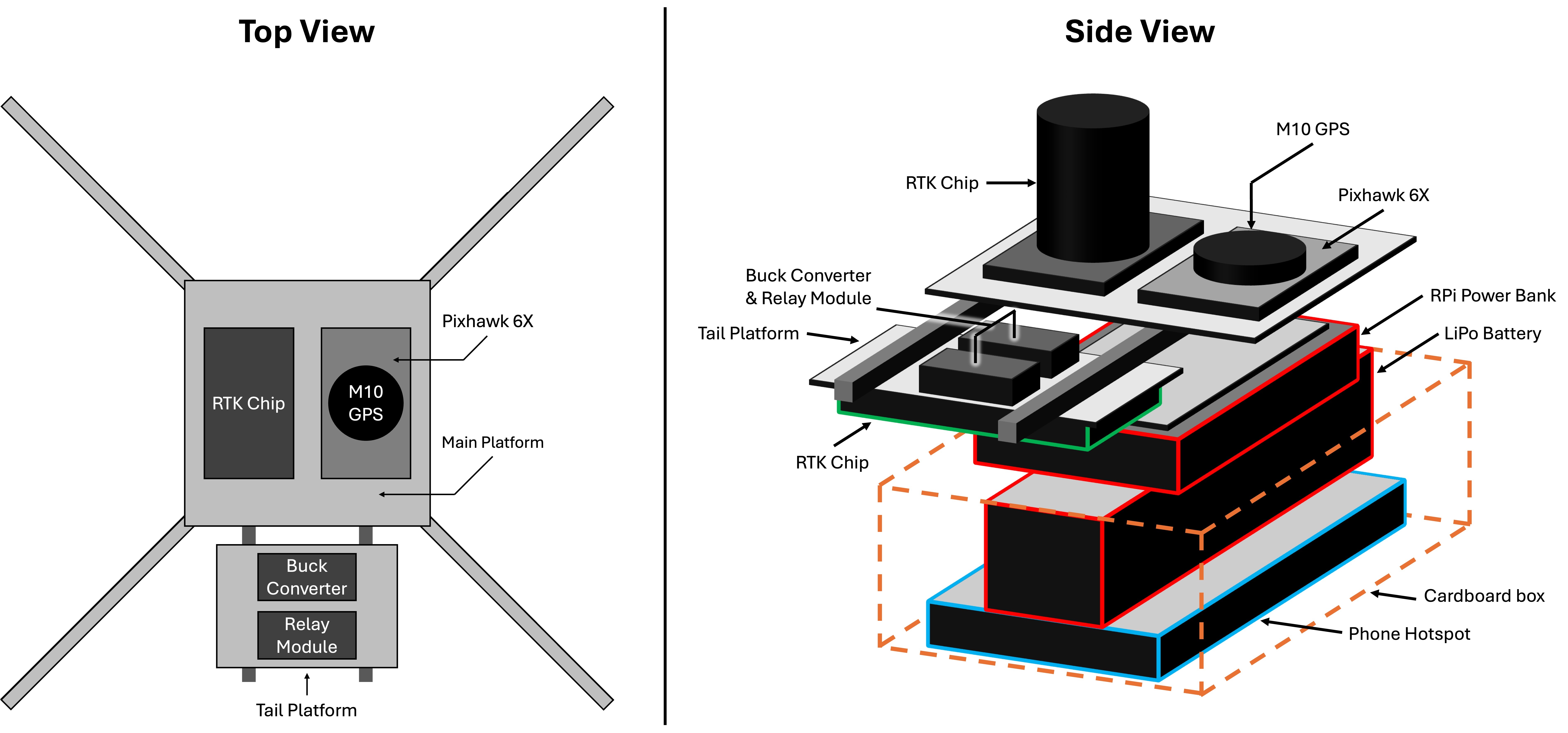
For certain LFL and FD combinations, the FOV spatial footprint (FSF) of the experiment is too large to cover effectively with a calibration board. Note that we cannot place the calibration board arbitrarily close to the camera, as it may be too out of focus for reliable calibration. Instead, we use a drone as a mobile calibration target to establish 2D–3D correspondences for camera calibration. The hardware used includes:
For each drone calibration experiment, we position the drone to hover at a set of 3D locations within the camera’s FOV, arranged in a 4 × 3 × 2 grid. At each hover point, we send a signal to the Raspberry Pi to simultaneously activate a red LED on the drone and record the drone’s RTK position. From the recorded footage, we extract the 2D locations of the LED flashes, establishing 2D–3D correspondences used for camera calibration.